




我们备有应对高精度、高负载使用场合的丝杆串联和并联型,长行程高速搬运的皮带型,多种不同规格可应对不同使用场合的需要。
结构类型: 丝杆串联型、丝杆并联型、皮带驱动型
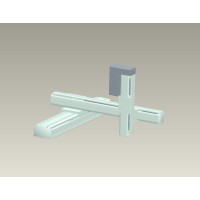
l 多种组合方式,灵活多变。
利用专用连接件,可根据需要随意将多条机械手组合使用:两轴直角式组合、三轴直角式组合、三轴龙门式组合。
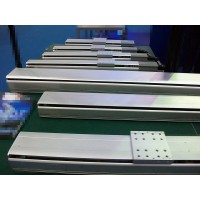
l 高强度、高刚性型材底座
机械手底座采用高强度挤压铝合金型材,为中空加强构造,表面阳极氧化处理,保证了机械手运行时的刚性,同时保证底座安装面和滑块基准面的平行度小于±0.05mm/m,及机械手运行时的直线度小于±0.05mm/m,以上数值为安装平面度为0.05mm/m以下。
条件:在20°C时,底座平面度及机械手直线度均为0.05mm/m以下。
l 重复定位精度及绝对定位精度均为<0.02mm
重复定位精度:即机械手在同一点进行重复定位时,停止位置误差的最大范围值。
绝对定位精度:即机械手行走范围内的任意点定位时的坐标值和实际测量时的差。
l 合理的安装方式
a.底部T型槽,配备能自由滑动的安装螺母,安装孔距可任意调节.
b. 侧面配有压板槽,可采用侧压式安装.
c. 底部预制连接孔.
灵活多变的安装方式使电缸能适应任何安装要求.




